- Profile
-
田熊 隆史 准教授
たくま・たかし 2001年京都大学大学院情報学研究科システム科学専攻修士課程修了。2006年大阪大学大学院工学研究科知能・機能創成工学専攻博士後期課程単位取得退学。同大特任研究員を経て、2008年大阪工業大学工学部電気電子システム工学科講師。2013年から現職。博士(工学)大阪大学。滋賀県出身。
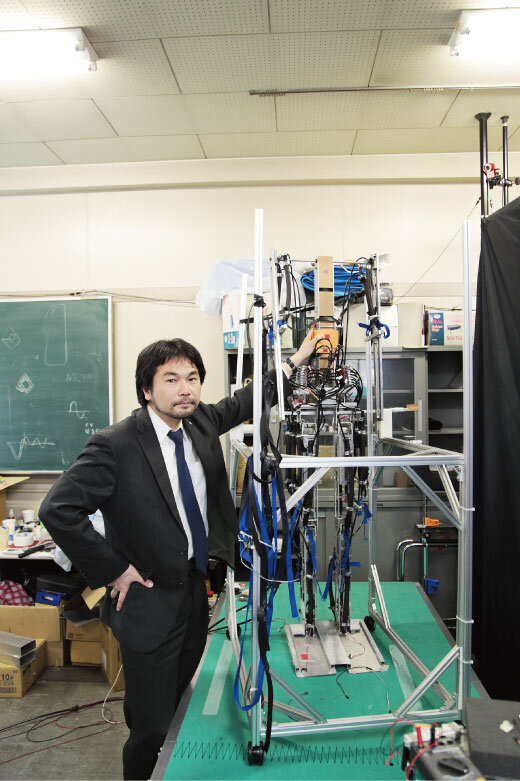
田熊准教授らの研究チームは、体の中心である体幹を関節のある柔軟な構造にすることで、2足歩行や4足歩行を自由に切り替えられるロボットの開発を目指しています。従来のロボットの体幹は大半が柔軟性のない剛体です。しかし、動物の体幹である背骨には椎骨と椎骨の間に関節があり、人間の頭を支える時はS字状に曲がり、四足動物なら内臓を支えるために直線状もしくは凸状に湾曲しています。これまでのロボットの手足の動きに限界を感じていた田熊准教授は、動物のような自由な動きには手足をつなぐ体幹の構造が大きくかかわっているのではと着目しました。「ロボット開発では手足にばかり重点が置かれてきましたが、体幹部分を動物に模して柔軟構造にすると手足の動きももっと柔軟になるのでは、と仮説を立てています」と話します。
ソフトロボットは近年やっと注目され始めた分野です。「柔らかいというのは揺れるということを意味し、制御の観点からは“ご法度”でした。だからこれまでのロボットのほとんどは硬い材料で作られているのです」とその理由を話します。しかも、柔軟な体幹を持つロボットの開発はまだまだ希少で、多様な歩行ができるロボットは世界的にも実現していません。田熊准教授はこれまでの研究で、関節のある体幹を持つロボットでは歩行のバリエーションが広がり、歩行速度が上がることを確認しています。今後は、体幹の特性を変えることで多様な歩行形態を単独のロボットで実現することを目指し、その体幹機構の設計指針を確立しようとしています。そのために京都大、大阪大の研究者2人との研究チーム身体活動量計 ペグボード外出行動のバロメーターを高齢者の健康維持と向き合うで役割分担し、さまざまな体幹機構の試作と評価、2足・4足歩行を切り替えるゴリラやチンパンジーの身体構造の調査、運動中の体幹機構のメカニズムの数理解析による理論的な裏付け、などに取り組みます。
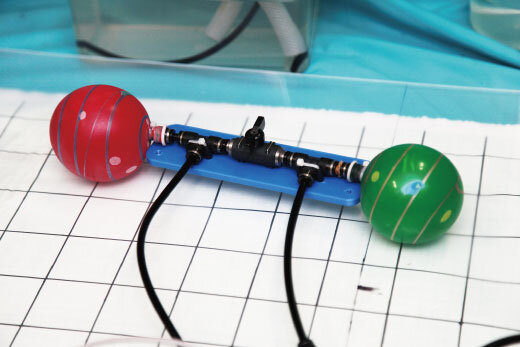
障害物にぶつかっても変形して進むことのできるゴム風船を使ったソフトロボットなどユニークな研究に取り組む田熊准教授。「柔らかさにチャレンジすることで、人や動物と同じ運動能力を持つロボットを作ることが目標です」と話します。
 前の記事へ
前の記事へ