- Profile
- かわい・としかず 1996年神戸大学工学部情報知能工学科卒。1998年同大学院自然科学研究科情報知能工学専攻修士課程修了。2005年大阪大学大学院情報科学研究科バイオ情報工学専攻博士課程修了。日立製作所機械研究所研究員、信州大学医学部脳神経外科研修生、慶應義塾大学医学部共同研究員などを経て、2007年大阪工業大学工学部生体医工学科准教授。2017年から現職。博士(工学)。島根県出身。
地方における医師不足が深刻化し、都市部との医療格差が進んでいます。都市の病院には高いスキルを持つ外科の専門医がいても、過疎化が進む地方では手術スタッフがそろわず、患者が都市の病院に出向くか、医師の出張手術を待たなければなりません。医療格差の解消を目指して「誰もが最新の医療を受けられるようにしたい」と医療用ロボットの研究を進める大阪工大ロボット工学科の河合俊和教授に話を聞きました。
阪神・淡路大震災の経験から「工学で命を助けたい」
私の研究室では、医師と共存協調できる手術助手ロボットを医工・産学連携で研究しています。手術では複数の医師が執刀と助手を役割分担していますが、ロボットの支援により医師1人で執刀できることを目指しています。医師1人で対応できるようになれば、長時間労働に悩む外科医の働き方改革や医師不足が深刻な地域医療への支援、医療費の低減など、さまざまな課題解決につながると考えるからです。
医療に関わる研究のきっかけは、大学3年で経験した阪神・淡路大震災です。下宿していた神戸市灘区のワンルームマンションは半壊し、身の周りで多くの命が失われました。工学分野で命を助けることを意識するようになり、大学4年で配属される研究室は義手の研究をしている先生を選びました。
就職してからも人に役立つ研究をと希望し、脳神経外科向けのロボット開発に携わることになりました。医療については門外漢でしたが、上司から「現場で学んで来い」と送り出され、大学の脳神経外科で1カ月を過ごしました。毎日、午前8時のカンファレンス(医師が参加する患者の状態や治療方針についての話し合い)に同席し、手術にも立ち会いました。就職するまでは、血は見るのも苦手だったのですが、仕事だと割り切ると不思議と平気でした。
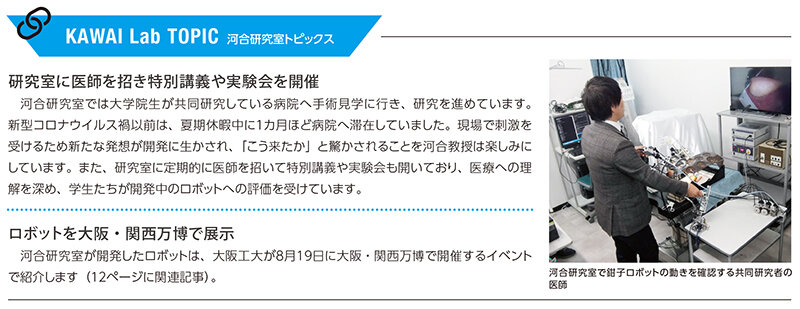
医師が使う器具を知り、話していることや手の動かし方などをひたすらメモしました。現場で学んだことを元にロボットを開発し、動物実験や大学病院でのご遺体による実証を経て、医工・産学連携で世界初のロボット支援脳神経外科手術を成功させることができました。その後は、触覚を高い精度で伝えられる腹腔外科向けロボットも開発しました。どちらのロボットも人間の手では不可能な微細手術を実現することができたのですが、開発コストが高く、一般病院に広く使ってもらうには至りませんでした。そこで、大学に移籍して手術助手ロボットの研究をすることにしたのです。
良性疾患対象に小型で安価な助手ロボット
手術を支援するロボットとしては、アメリカで開発された「daVinci(ダビンチ)システム」が有名です。執刀医は患者から離れた場所から3本以上のアームを遠隔操作しています。執刀医のいる場所は手術室ですが、患者の横で手術をしないので医師自身の手指消毒の必要はありません。ロボットの動きは微細で、医師の手で行う内視鏡外科手術に比べて難しい手術にも対応できるという点は優れています。しかし、執刀医が患者さんから離れているため急変に気づきにくく、導入には億単位のコストがかかるため大規模病院以外は対応しづらいという課題があります。
私たちのグループが研究を進めている手術助手ロボットは、滅菌した場所で、手洗いをして手指衛生を保った執刀医が両手で術具を持って手術をしつつ、必要に応じて助手ロボットのアームを操作します。人のスキルを超えられるものではないので良性疾患が対象ですが、目の前に患者さんがいるので執刀医は容態の変化を敏感に察知できますし、システムは小型なので比較的安価に製造できます。現在、開発しているロボットには、鉗子ロボット(図1)と内視鏡ロボット(図2)があります。
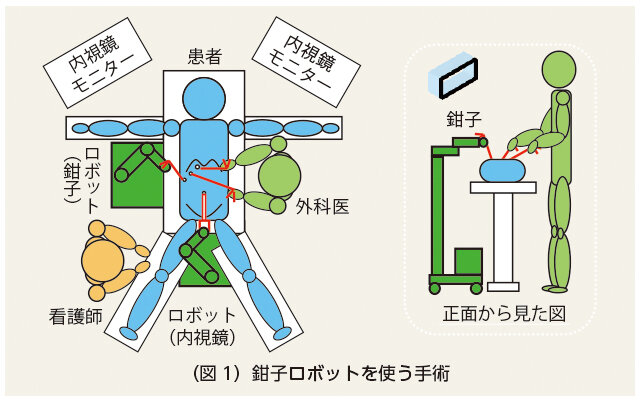

鉗子とは、手術器具の1つです。はさみのような形をしていて、体の器官や組織を挟んだり、圧迫したりするのに使います。臓器を「仕上がり良く」きれいに切開するには、鉗子で臓器を左右からぴんと引っ張った状態にすることが欠かせません。通常は助手役の医師が引っ張るのですが、執刀医がロボットを使って鉗子で引っ張る作業をこなせば、1人で執刀と助手ができます。
臓器を引っ張る力や速度、精度、動作範囲などを踏まえて、設計は以下のような観点から取り組みました。
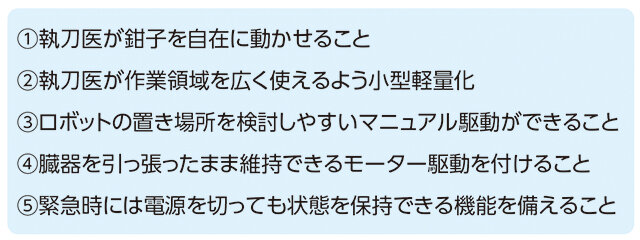
執刀医が手術器具を持つ手や足の踏ん張り、モニターを見る頭などの動作を解析して、手術を進めながらも、ロボットを簡易に操作できるよう、手の指先で操作できるスイッチや、手元や足元に操作デバイスを置いて動作を制御できる仕組みも開発しました。当初は重量が40~50キロ近くありましたが、現在では2キロと1人で持ち運びできるほどコンパクトになりました。
この研究は、国立がん研究センター東病院大腸外科や京都大大学院医学研究科、東京女子医科大先端生命医科学研究所と連携して取り組んでいます。
 河合教授の医療ロボティクス研究室より
河合教授の医療ロボティクス研究室より鉗子ロボットLODEMのデモ
https://youtu.be/BLcllow-fQE
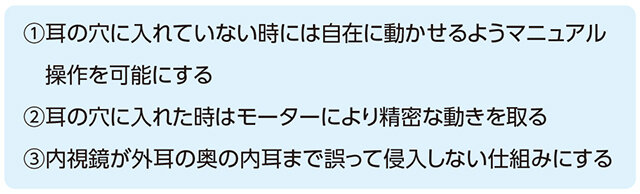
一方、内視鏡ロボットは、神戸大医学部附属病院耳鼻咽喉・頭頸部外科や大阪大大学院基礎工学研究科との共同研究です。「経外耳道的内視鏡下耳科手術」という耳の穴から内視鏡を入れて行う手術を支援するのが目的です。従来の手術では、医師が左手で内視鏡を持って耳の穴から挿入し、モニターに映る画像を見ながら、内視鏡の隙間から器具を差し入れて手術していました。私たちはロボットに内視鏡を保持させて、医師が両手を使って手術できるようにしたいと考えました。現在は試作を重ねている段階で、以下の3点を備えたシステムを考案しています。
現場百回、枯れた技術も大切に
手術助手ロボットの開発で難しいことは、医師の使う言葉を工学的な用語に変換することです。手術の教本はありますが、実際に症例を重ねて身につけた経験値による部分も多く、言葉で説明してもらっても「しっかり引っ張って術野を展開したい」など感覚的な表現で、数値に落とし込むのに苦労します。また、教本には執刀医の動きについては説明がありますが、助手の動きについては触れられていないことが多いので、現場を観察して学ぶことがほとんどです。
学生には、「現場百回」と伝えています。緊張感を持って病院に身を置き、命と日々向き合っている外科医と言葉を交わし、体験することから考えてもらいたいのです。試作機が研究室では動いていても、病院に持ち込むと不具合が生じて調整に時間がかかることも珍しくありません。学生には「シンプルで分かりやすいものがベスト」で、最新技術ばかりでなく、古くから使われて安定さが裏付けられている「枯れた技術も大切」と教えています。手術に使うロボットの開発は、性能面だけを考えれば工学的な実験でも間に合いますが、利用者である医師の意見に耳を傾ける経験を重ねていれば、将来エンジニアとして活躍する際に役立つ本当の力がつくと思います。
現在開発している手術助手ロボットは腹腔外科と耳鼻科向けですが、他の診療科でも対応できるものを更に開発していきたいと思っています。医師の偏在や働き方改革、少子化など外科医を取り巻く状況が厳しくなっています。手術助手ロボットが増えることで、離島や山間部など、地方に住む患者さんでも自宅近くの病院で手術できるような将来が来てほしいと思います。どこに生まれてもどこに住んでいても医療が保障されるような社会へと、工学分野からの貢献を続けていきます。
デジタルパンフレットはこちらから /flow/magazine/111/webt/index.html#page=5
 前の記事へ
前の記事へ